ABB机器人支持多任务。
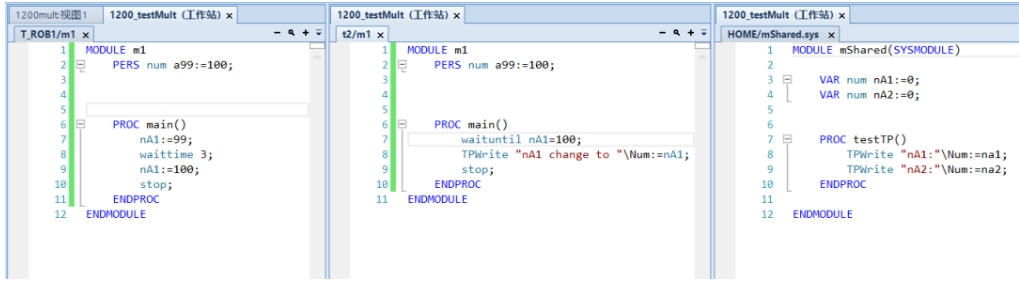
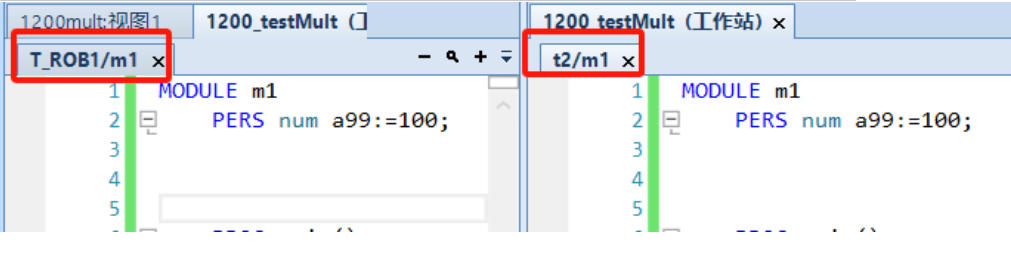
在每个任务中,创建相同的数据类型和数据名称且存储类型为pers,任务之间能共享这个数据值。
例如在两个任务都定义pers num a99,任意任务中修改a99,其余任务的a99也被修改。
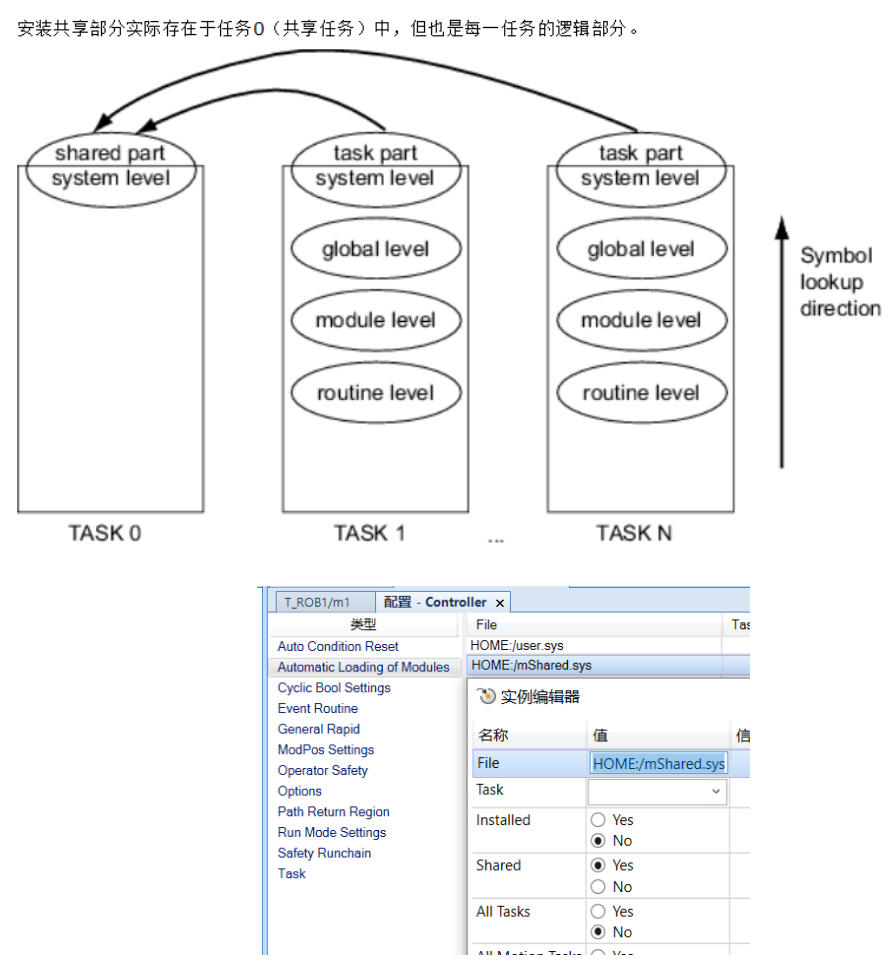
另一种共享数据和指令的方式,是把所有需要共享的数据和程序放在一个模块中,并通过controller的auto load module来加载该模块(第一次加载可以使用普通重启,若模块修改,需要通过P启动重新加载,加载属性为shared。
被设置为shared的模块,实质属于Task0,任何其他任务都可以调用,同时减少RAPID内存的消耗。shared模块内的数据不论pptomain等操作(即使var)也会一直保持数据,直到p启动操作才会重新设回初值。
shared模块,即使不设置nostepin和noview,用户也不能单步进入,加载的模块不可见。
例如编写mShared模块,包括nA1和nA2数据,通过重启加载后,在Task1中操作nA1,Task2中可以获取nA1的新值。
避免在不同task同时对同一个shared模块中的数据进行读写。