ABB 机器人 OmniCore E10 控制柜的接线和相关接口说明如下:
接口概述
OmniCore E10 控制柜的主要接口包括电源输入端连接器 X0、电机连接器 X1、机械臂信号连接器 X2、数字 I/O 接口 X5、客户可选电源输入 X6、HMI 连接器 X4、客户安全接口 X9 等。
接线说明
电源接线:控制柜采用单相 220V 电源输入,通过电源输入端连接器 X0 连接电源。连接时需确保电源电压在额定范围内,并按照正确的极性进行连接。
电机接线:使用电机连接器 X1 连接机器人本体的电机电缆,确保电机电缆的各相接线正确,以保证电机的正常运转。
I/O 接线
数字输入(DI)接线:将外部开关(如按钮)一端连接到 IO 模块的 DI 端子(如 “DI1”),另一端连接到控制柜提供的 0V(GND)端子。
数字输出(DO)接线:将执行器(如继电器线圈)一端连接到 DO 端子(如 “DO1”),另一端连接到外部 24V 电源的正极,外部电源负极连接到控制柜 GND。
模拟 IO 接线:根据传感器或执行器的类型,将其输出线连接到相应的 AI 或 AO 端子,并设置跳线选择电压 / 电流模式。
安全接口接线
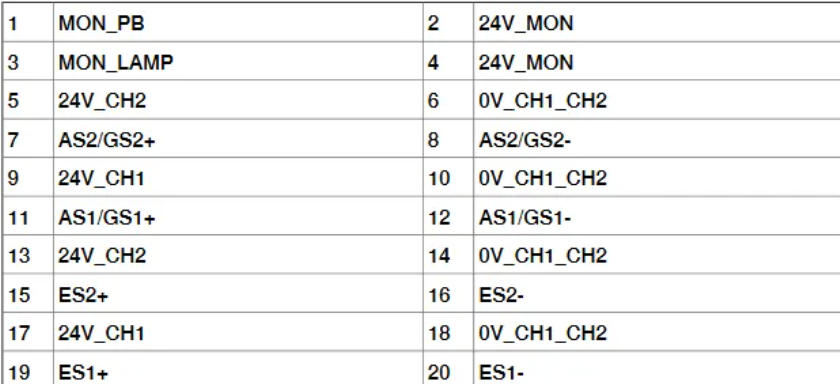
急停回路(ES)接线:ES1+/ES2 + 连接外部紧急停止输入端的安全回路高压侧,ES1-/ES2 - 连接安全回路低压侧,24V_CH1/2 为控制器提供的 24V 电源,仅供停止开关使用,0V_CH1_CH2 为电源参考接地。
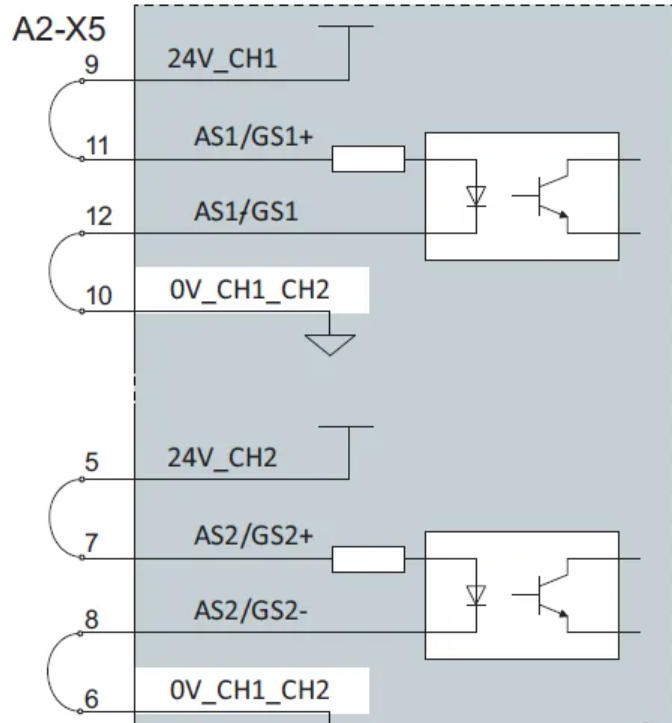
自动停止 / 通用停止(AS/GS)回路接线:AS1/GS1+、AS2/GS2 + 连接到 24V 电源,AS1/GS1-、AS2/GS2 - 连接到 24V 电源的参考接地,24V_CH1/2 为控制器提供的 24V 电源,0V_CH1_CH2 为电源参考接地。
接口详细说明
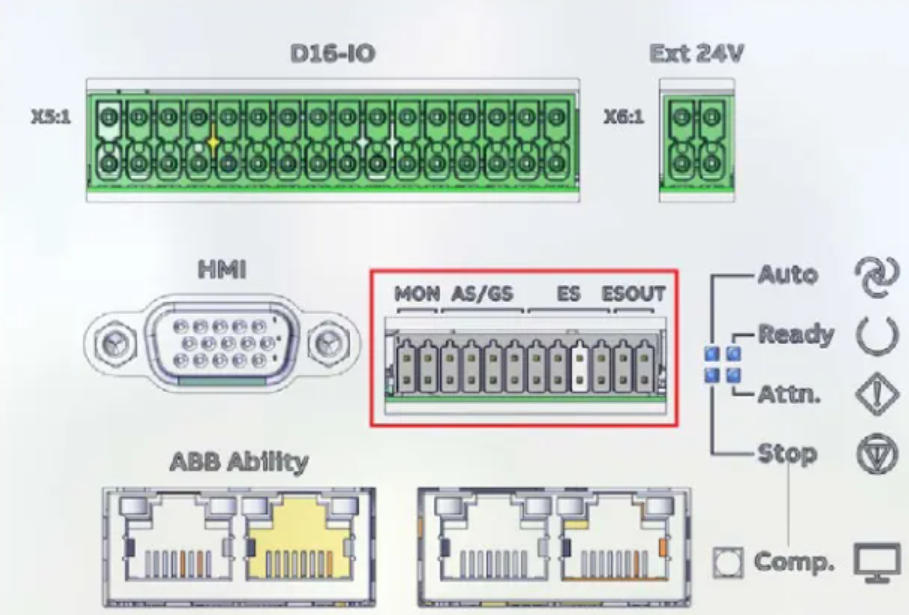
数字 I/O 接口 X5:E10 控制柜自带 16 数字输入和 8 数字输出接口,通过该接口可连接传感器、执行器等外部设备,实现开关量信号的输入输出控制。
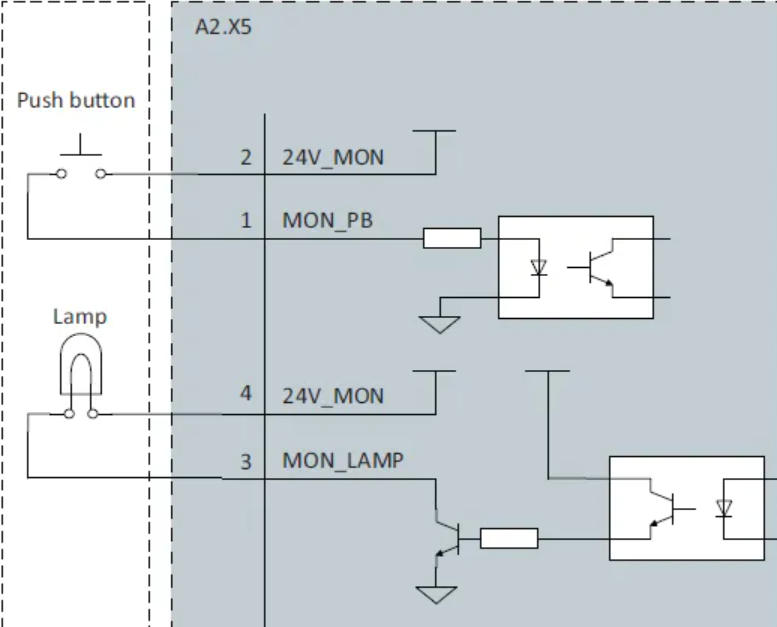
客户安全接口 X9:该接口分为电机启动与指示灯状态、AS/GS - 自动停止 / 通用停止回路、ES 急停回路、急停状态输出四部分。其中,MON_PB 为 “电机通电” 按钮输入接口,MON_LAMP 为 “电机开启” 指示灯输出接口;AS/GS 回路用于连接外部安全围栏等安全装置;ES 回路用于连接紧急停止开关。
HMI 连接器 X4:用于连接机器人示教器,实现对机器人的手动操作和编程调试等功能。
Gofa 机器人是 ABB 的协作机器人,其控制柜的电流电压等相关问题如下:
电源电压要求:Gofa 机器人控制柜的电源输入通常为单相 220VAC,电压波动范围一般要求在额定值的 ±10% 以内,频率为 50Hz。例如,Gofa 5、Gofa 10 和 Gofa 12 等型号的机器人,其控制柜在正常工作时需要稳定的 220V 电源供应,以确保机器人的各个部件能够正常运行。
电流要求:Gofa 机器人控制柜的电流需求根据具体型号和配置有所不同。从机器人末端接口来看,Gofa 末端提供的 CP(customer power)接口支持最大电流 2A,CS(customer signal)接口最大支持 0.5A。而控制柜的整体输入电流,一般在设备的铭牌或技术规格书中会有明确标注,在接线时需要确保供电线路能够提供足够的电流,并且要根据电流大小选择合适的导线规格。
接线注意事项
电源接线:将电源线的一端连接到控制柜的电源输入接口 X0,另一端连接到外部电源插座。连接时需注意电源的极性和电压等级,确保连接正确无误。
电机接线:使用电机连接器 X1 连接机器人本体的电机电缆,电机电缆的各相接线要正确对应,以保证电机的正常运转。
信号接线:Gofa 机器人末端的 CS 和 CP 接口通过本体连接到控制柜的 X2 端口,在进行信号接线时,要根据设备的需求和接口的定义,将相应的信号线连接到 X2 接口的对应引脚。