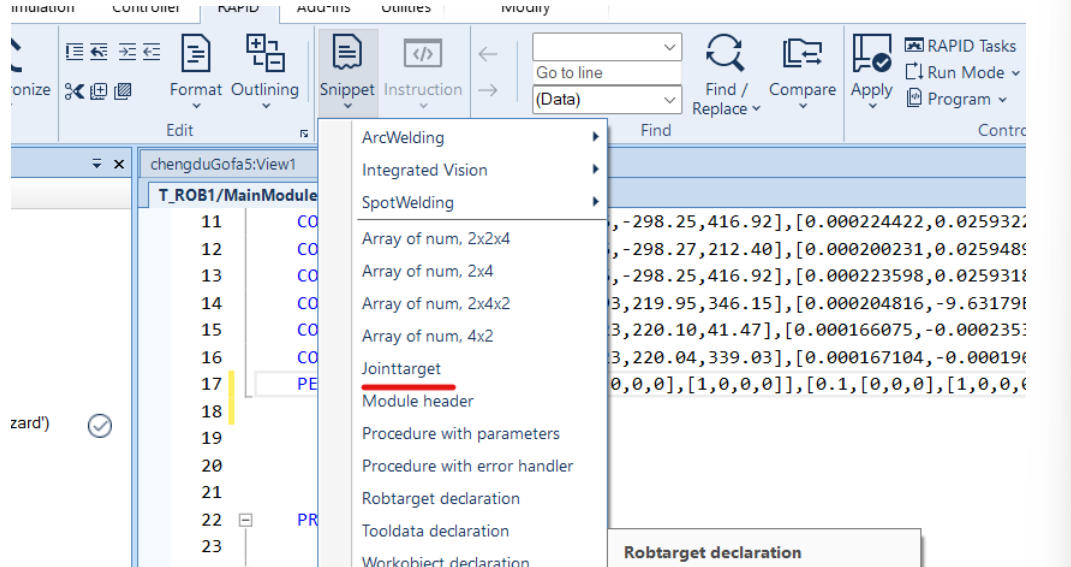
在 RobotStudio 中手动创建jointtarget(关节目标点)片段,适用于直接定义机器人特定关节角度位置,步骤清晰且可精准控制参数,具体操作如下:
已在 RobotStudio 中创建或加载机器人工作站(包含目标机器人,如 IRB 1200、IRB 6700 等)。
熟悉目标机器人的关节数量(如 6 轴机器人含 J1-J6,部分带外部轴需额外配置)。
在左侧 “工作站浏览器” 中,展开 “控制器” → 选中机器人对应的控制器(如 “Controller-1”)。
右键控制器 → 选择 “配置” → “RAPID”,打开 RAPID 程序模块管理界面。
双击需要添加jointtarget的程序模块(如默认的T_ROB1\Module1),打开 RAPID 编辑器。
在 RAPID 编辑器中,需先声明一个jointtarget类型的变量(用于存储关节角度数据):
在编辑器空白处右键 → 选择 “插入指令” → “变量声明”。
在弹出的 “变量声明” 窗口中:
类型:下拉选择 jointtarget(关节目标点类型)。
名称:自定义变量名(如MyJoint1,需符合 RAPID 命名规则:字母开头,无空格)。
点击 “确定”,生成变量声明语句:
rapid
VAR jointtarget MyJoint1; // 声明一个名为MyJoint1的关节目标点变量
jointtarget变量需要具体的关节角度、轴配置等参数,格式为数组,需手动填写或参考现有数据:
在变量声明下方,输入赋值语句(语法:变量名 := [参数列表];)。
参数列表格式(以 6 轴机器人为例,无外部轴):
rapid
[j1, j2, j3, j4, j5, j6, conf1, conf2, conf3, [extax1, extax2, ...]]
j1-j6:6 个关节的角度值(单位:度,需在机器人允许范围内,参考手册)。
conf1-conf3:轴配置参数(0 或 1,用于避免奇异点,新手可暂设为 0,后续根据报警调整)。
extax:外部轴角度(无外部轴时填[0,0,0,0],有外部轴需按实际数量填写)。
示例(IRB 1200 机器人,关节角度为 J1=0°、J2=-45°、J3=90°、J4=0°、J5=60°、J6=0°):
rapid
MyJoint1 := [0, -45, 90, 0, 60, 0, 0, 0, 0, [0,0,0,0]];
检查语法错误:若语句下方出现红色波浪线,说明格式错误(如逗号遗漏、角度超范围),需根据提示修正。
关联到运动指令(可选):若需让机器人运动到该关节点,可插入MoveJ指令并关联变量:
右键 → “插入指令” → “运动” → “MoveJ”。
在MoveJ指令中填写目标点为声明的变量,例如:
rapid
MoveJ MyJoint1, v1000, z50, tool0\WObj:=wobj0;
(v1000为速度,z50为转弯半径,tool0为工具坐标系)。
点击 RobotStudio 工具栏中的 “仿真” → “播放”,观察机器人是否按jointtarget的关节角度运动。
若出现报警(如 “关节超限”“轴配置冲突”):
轴配置参数:conf1-conf3决定机器人在同一位置的关节姿态(避免奇异点),若运动时报警 “轴配置冲突”,需修改这三个参数(通常为 0 或 1 的组合,如1,0,0)。
外部轴:若机器人带轨道、变位机等外部轴,extax数组需包含对应轴的角度(数量与外部轴数一致,如 1 个外部轴填[30,0,0,0]表示旋转 30°)。
单位一致性:所有角度均为 “度”,若误填为弧度会导致运动异常。
通过以上步骤,可手动创建并使用自定义jointtarget片段,精准控制机器人关节位置,适用于离线编程中固定姿态的复用场景。